Mimic-Ha: una mano animatronica realizzata dalla DAM Bros Robotics
By DAM Bros Robotics on November 23, 2017
Mimic-Ha è una mano animatronica realizzata dalla DAM Bros Robotics per il cinema ed il teatro. La DAM Bros Robotics è membra della comunità di costruttori di robot Rokers e collabora con il team della Hotblack Robotics che si occupa di robotica di servizio. Mimic-Ha è la prima che DAM Bros realizza con una pelle sintetica in silicone medicale per protesi. Può essere realizzata in varie dimensioni e forme grazie alla sua struttura interna stampata in 3D. Si può controllare con diverse modalità, con un controller dedicato, con smartphone via Bluetooth o via internet tramite ROS. Sono allo studio degli opportuni upgrade per farla diventare una protesi.
Il progetto Mimic-Ha nasce dall’unione di due realtà molto diverse. Qualche mese fa ci ha contattato Sveva Germana Viesti, abile creatrice di trucchi scenici per il cinema ed il teatro. Ha visto alcuni nostri lavori di robotica e stampa 3D e ci fa una proposta: mettere insieme la sua abilità nel replicare le parti anatomiche, con l’esperienza della DAM Bros Robotics nella progettazione, stampa 3D e controllo, per creare qualcosa che non si è ancora visto finora.
L’obiettivo è ambizioso, creare delle protesi che siano economiche ma che abbiamo un aspetto quanto più simile agli arti umani. L’idea ci piace molto e dopo qualche giorno abbozziamo le linee guida del progetto.
Decidiamo di iniziare con un prototipo animatronico non sensorizzato, per vedere la resa del risultato.
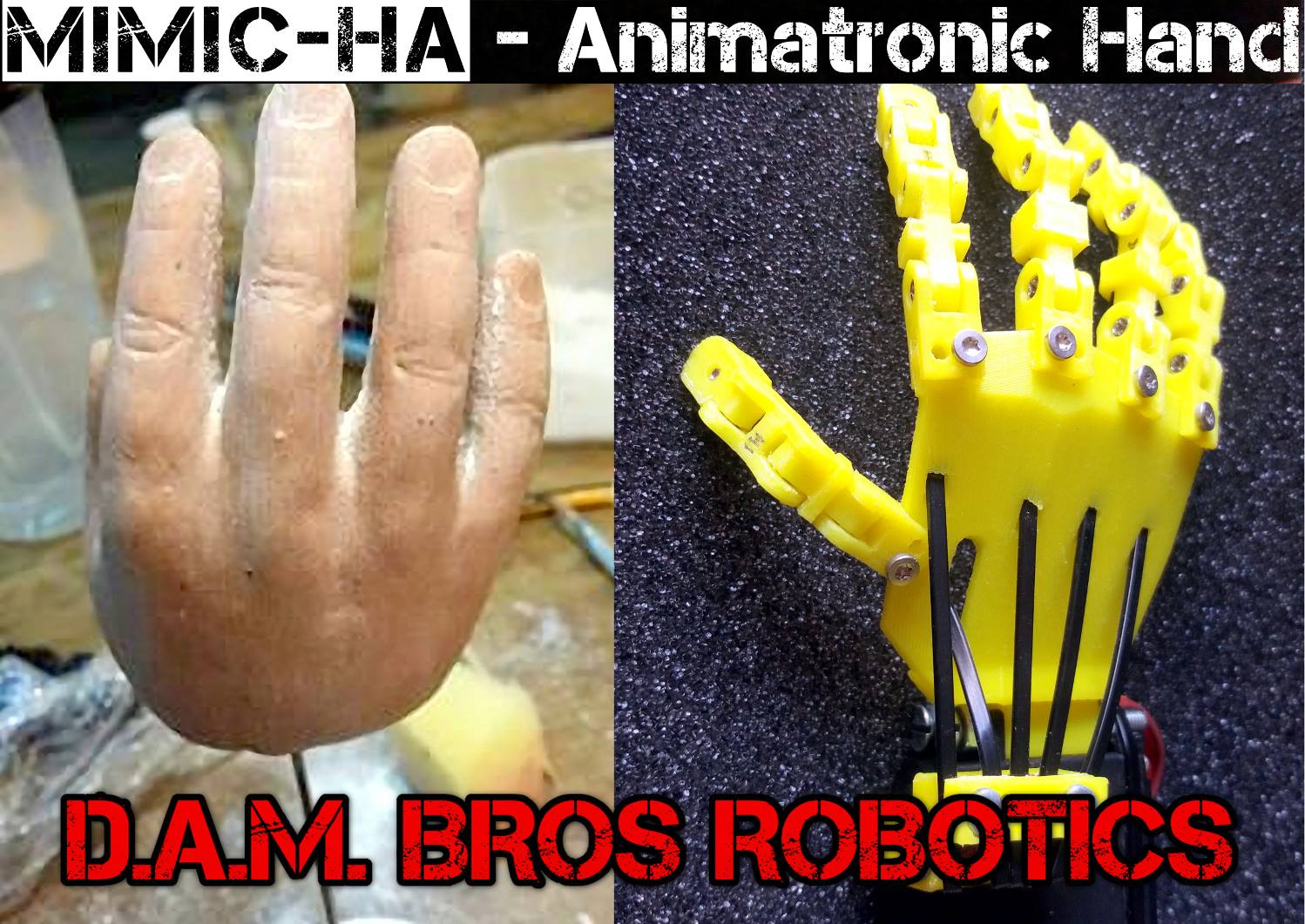
Il nostro progettista 3D Marco D’Ambrosi ha disegnato al CAD e stampato una struttura articolata che ha la funzione di replicare lo scheletro della mano umana. Terminata la struttura interna, la mano è passata a Sveva, che ne ha realizzato prima un calco poi una copertura in silicone scenico per realizzare una sorta di pelle sintetica.

Quando abbiamo attivato la mano la prima volta, l’unica parola che riuscivamo a dire era WOOOW.
La strada che ci aspetta è ancora tanta, ma abbiamo già pensato ai vari upgrade ed iniziato la sensorizzazione del sistema. L’upgrade più importante ed impegnativo sarà la realizzazione di una presa degli oggetti adattabile in base alla consistenza ed alla delicatezza del materiale.

I risultati dei primi test con i sensori fatti dagli ingegneri Alessandro Pauciulo e Mauro D’Ambrosi ci fanno ben sperare in un nuovo prototipo disponibile a breve.
Stay tuned :D